ROS2官网教程学习笔记理解ROS2参数服务器篇背景准备条件学习内容1. 运行节点2. ros2 param list3. ros2 param get4. ros2 param set5. ros2 param dump6. Load parameter file总结 学习目标:了解如何获得、设置、...
”param 参数 学习 学习笔记 教程 服务器 节点服务器“ 的搜索结果


概述ROS参数服务器能够保存 string, int, float, double, bool, list, dictionaries, base64 encoded类型的数据,如果需要保存其他类型可以使用 XmlRpc::XmlRpcValue classroscpp 有两种不同的参数API1. bare 版本 ...
参数服务器是ROS中用于存储和共享参数的中央存储库。它是一个全局的、分布式的键值存储系统,允许ROS节点在运行时动态地存储...参数服务器可以在多个节点之间共享参数,并且可以通过修改参数的值来实现节点之间的通信。

Rabbitmq



本人ROS小白,利用寒假时间学习ROS,在此以笔记的方式记录自己每天的学习过程。争取写满20篇(6/20)。:严格按照下方学习链接的教程配置,基本一次成功。笔记绝大部分代码使用编写。:launch文件标签。

4 ROS2节点参数基础
标签: ROS2
ROS2节点参数基础,采用C/C++和Python实现简单节点参数的增删改查
1.创建SAXReader对象2.解析XML获取Document对象:需要传入要解析的XML文件的字节输入流3.获取文档的根标签4.获取标签的子标签//获取所有子标签//获取指定标签名的子标签ListsonElementList = rootElement.elements(...


skynet学习笔记03— skynet服务
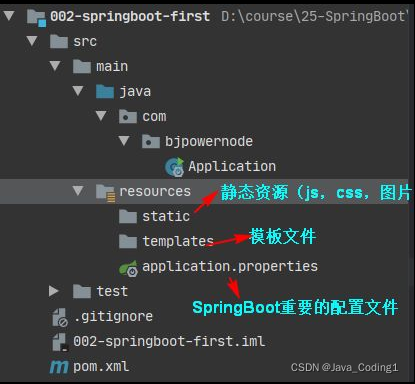
Django官网:https://www.djangoproject.com/Django 采用了 MVT 的软件设计模式,即模型(Model),视图(View)和模板(Template)。建议图:用户操作流程图:Django 本身基于 MVC 模型,即 Model(模型)+ View...



动力节点dubbo学习笔记,视频链接:https://www.bilibili.com/video/BV1Sk4y197eD

ROS参数服务器能够保存 string, int, float, double, bool, list, dictionaries, base64 encoded类型的数据,如果需要保存其他类型可以使用 XmlRpc::XmlRpcValue class roscpp 有两种不同的参数API ...

在ROS Master中就存在一个参数服务器Parameter Server,它是一个全局字典,用来保存各个节点的配置参数,每个节点都是可以访问的,并且会返回需要得到的值。无论是在哪里设置的,只要是参数就会被放到这个全局字典...

推荐文章
- Android 编译so文件 MP4V2_android下编译mp4v2-程序员宅基地
- 通讯录Contact_02_contact文件内容-程序员宅基地
- Qt笔记(四十二)之QZXing的编译 配置 使用_qzxingfilterrunnable error:-程序员宅基地
- 关于画图软件Dia打开程序始终为英文界面的问题-程序员宅基地
- OpenCV从入门到精通实战(二)——文档OCR识别(tesseract)-程序员宅基地
- 详解avcodec_receive_packet 11_avcodec_receive_packet eagain-程序员宅基地
- OpenGL SuperBible 7th源码编译记录_superbible7-media github-程序员宅基地
- Wireshark简单使用-程序员宅基地
- MXNet 粗糙的使用指南_iou loss mxnet-程序员宅基地
- iOS对ipa包进行代码混淆《二》 ---代码混淆_ipa包混淆-程序员宅基地